


- 地址:
- 山东省淄博市张店区房镇镇三赢路5号山东德元科创园1-305
- 邮箱:
- guanrunjx@126.com
- 手机:
- 13695023369
- 电话:
- 0533-7218228
[0001]本发明涉及驾驶辅助系统,特别是涉及一种稳定性高、反应时间快的驾驶辅助系统及车辆实时预警提醒方法。
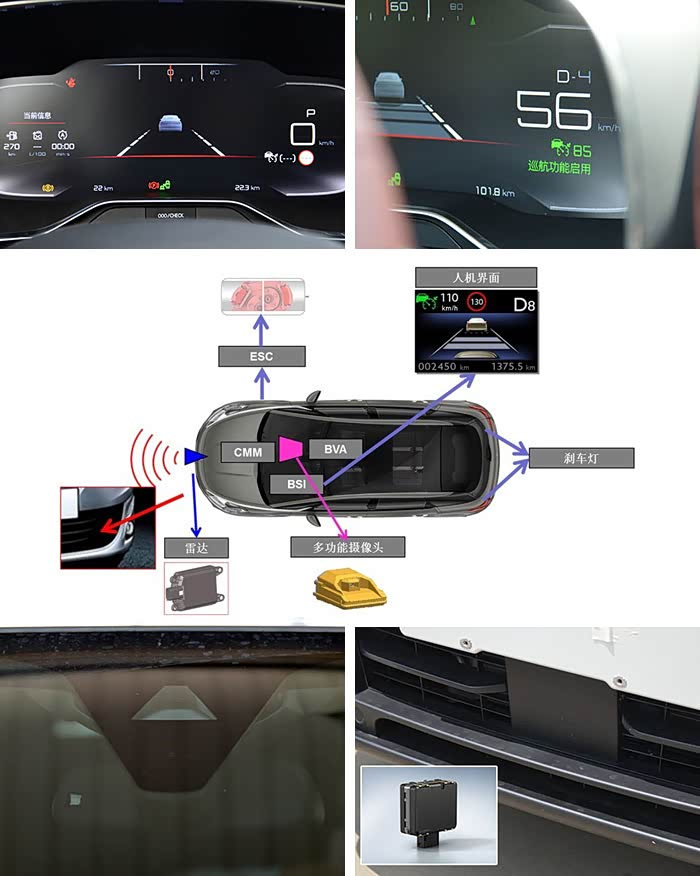
[0002]传统的车辆驾驶完全依赖于驾驶员,当驾驶员经验不足,或疲劳驾驶的情况下,极易发生道路交通事故。高级驾驶辅助系统,即ADAS(Advanced Driver Assistance System)是一种辅助驾驶员对车辆进行操作的系统。ADAS通过安装在车辆上的传感器或摄像头采集车辆周围环境的数据,并对采集到的数据进行处理,为驾驶员提供车辆行驶状况的信息,帮助驾驶员做出正确的决策,从而提高行车的安全性。
[0003]现有的ADAS使用雷达测距、测距传感器或机器视觉来检测车辆周围环境,并根据周围环境对驾驶员做出相应的提醒。雷达测距覆盖的角度范围小,并且容易受到其他雷达装置和通信设施的电磁波干扰。激光测距传感器能够覆盖大的角度范围,但激光测距传感器的主要缺点在于高速环境下稳定性会降低,不适合用于高速行驶中的车辆测距。测距传感器只能够判断与本车距离较近的前方物体,而无法更加精确地预估本车与前方车辆的相对位置关系,并且无法判断前方车辆是否是线]由于现有的ADAS无法准确判断前方车辆与本车的具体位置关系,因此有可能在本车接近相邻车道的前方车辆时(比如,超车时)发出误报警,干扰驾驶员的正常驾驶。
【发明内容】[0005]基于此,有必要一种稳定性高、反应时间快的驾驶辅助系统及车辆实时预警提醒方法。
[0009]数据处理模块,用于处理所述图像数据,提取车道线,根据提取的车道线,划定以图像视点为中心、并以该图像视点左右各一条车道线为边界的图像区域为感兴趣区域,识别所述感兴趣区域内的采集目标,根据所述当前车辆的速度参数、获取所述采集目标与当前车辆的相对位置参数;判断所述相对位置参数是否达到碰撞阈值,当所述相对参数值达到碰撞阈值时发出预警信号。
[0010]在其中一个实施例中,所述采集目标包括前向车辆、车道线和/或行人;则,所述数据处理模块包括:
[0011 ]交通目标识别子模块,用于依据所述图像数据,提取车道线,根据提取的车道线获得所述感兴趣区域,并识别所述感兴趣区域内的前向车辆和/或行人;
[0013]前向车辆碰撞预警子模块,所述前向车辆碰撞预警子模块在所述交通目标识别子模块识别出前方车辆时,获取当前车辆与前方车辆之间的第一相对位置参数,判断所述第一相对位置参数是否达到第一碰撞阈值,当所述第一相对参数值达到第一碰撞阈值时发出输出至所述预警模块的第一预警信号,用以输出显示;
[0014]行人碰撞预警子模块,所述行人碰撞预警子模块在所述交通目标识别子模块识别出行人时,获取当前车辆与行人之间的第二相对位置参数,判断所述第二相对位置参数是否达到第二碰撞阈值,当所述第二相对参数值达到第二碰撞阈值时发出输出至所述预警模块的第二预警信号,用以输出显示;和,
[0015]车道偏离预警子模块,所述车道偏离预警子模块用于根据所述交通目标识别子模块识别出的车道线,计算当前车辆的前轮预计接触到车道线的剩余时间,判断所述剩余时间是否达到安全阈值,当所述剩余时间达到安全阈值时发出输出至所述预警模块的第三预警信号,用以输出显示。
[0016]在其中一个实施例中,所述交通目标识别子模块还基于车辆外形特征模板判断所述感兴趣区域中是否存在前方车辆,当识别出前方车辆时向所述前向车辆碰撞预警子模块发出第一操作信号,根据所述第一操作信号,所述前向车辆碰撞预警子模块获取当前车辆与前方车辆之间的距离、及当前车辆相对于前方车辆的行驶速度和加速度,并计算当前车辆与前方车辆出现碰撞的预计碰撞时间,作为所述第一相对位置参数。
[0017]在其中一个实施例中,所述交通目标识别子模块还基于行人的外形特征模块判断所述感兴趣区域中是否存在行人,当识别出行人时,向所述行人碰撞预警子模块发出第二操作信号,根据所述第二操作信号,所述行人碰撞预警子模块获取当前车辆与行人之间的距离、及当前车辆相对于行人的行驶速度和加速度,并计算当前车辆与行人出现碰撞的预计碰撞时间,作为所述第二相对位置参数。
[0018]在其中一个实施例中,所述交通目标识别子模块还用于识别所述图像数据的交通标志,获得所述交通标志的变化情况和/或当前状态;
[0020]所述交通标志智能提醒子模块输出提示所述交通目标识别子模块识别出的所述交通标志的变化情况和/或当前状态。
[0021]在其中一个实施例中,所述车道偏离预警子模块还用于根据所述交通目标识别子模块识别出的车道线,计算当前车辆前轮相对于车道线的侧向距离、以及当前车辆的侧向偏移速度,并将所述侧向偏移速度与一预设阈值进行比较,当所述侧向偏移速度小于预设阈值时,则根据所述侧向偏移速度及所述侧向距离,计算所述剩余时间。
[0022]在其中一个实施例中,所述系统还包括预警模块,用于接收所述预警信号并输出显示,其中,所述预警模块至少包括以下模块之一:
[0023]语音提示模块,用于接收所述数据处理模块发出的预警信号产生语音信号,用以对用户进行预警提示;
[0024]闪烁提示模块,用于接收所述数据处理模块发出的预警信号产生光闪烁信号,用以对用户进行预警提示;和,
[0025]显示模块,用于显示所述图像数据和所述速度数据,并叠加显示所述数据处理模块发出的预警信号。
[0028]处理所述图像数据,提取车道线]根据提取的车道线,划定以图像视点为中心、并以该图像视点左右各一条车道线为边界的图像区域为感兴趣区域;
[0032]根据所述当前车辆的速度参数,获取所述采集目标与当前车辆的相对位置参数;
[0033]判断所述相对位置参数是否达到碰撞阈值,若是,则发出报警信号。
[0034]在其中一个实施例中,所述采集目标包括前向车辆、车道线和/或行人;则,所述根据所述当前车辆的速度参数、获取所述采集目标与当前车辆的相对位置参数,判断所述相对位置参数是否达到碰撞阈值,若是,则发出报警信号的过程至少包括以下步骤之一:
[0035]所述采集目标为前方车辆时,获取当前车辆与前方车辆之间的第一相对位置参数,判断所述第一相对位置参数是否达到第一碰撞阈值,当所述第一相对参数值达到第一碰撞阈值时发出输出至所述预警模块的第一预警信号,用以输出显示;
[0036]所述采集目标为行人时,获取当前车辆与行人之间的第二相对位置参数,判断所述第二相对位置参数是否达到第二碰撞阈值,当所述第二相对参数值达到第二碰撞阈值时发出输出至所述预警模块的第二预警信号,用以输出显示;和,
[0037]所述采集目标为车道线时,根据所述车道线,计算当前车辆的前轮预计接触到车道线的剩余时间,判断所述剩余时间是否达到安全阈值,当所述剩余时间达到安全阈值时发出输出至所述预警模块的第三预警信号,用以输出显示。
[0038]在其中一个实施例中,根据当前车辆与前方车辆之间的距离、及当前车辆相对于前方车辆的行驶速度和加速度,计算当前车辆与前方车辆出现碰撞的预计碰撞时间,作为所述第一相对位置参数;
[0039]根据当前车辆与行人之间的距离、及当前车辆相对于行人的行驶速度和加速度,计算当前车辆与行人出现碰撞的预计碰撞时间,作为所述第二相对位置参数;
[0040]根据所述车道线,计算当前车辆前轮相对于车道线的侧向距离、以及当前车辆的侧向偏移速度,并将所述侧向偏移速度与一预设阈值进行比较,当所述侧向偏移速度小于预设阈值时,则根据所述侧向偏移速度及所述侧向距离,计算所述剩余时间。
[0041]上述驾驶辅助系统及车辆实时预警提醒方法,通过图像采集模块采集当前车辆前方采集目标的图像数据,再由交通目标识别子模块识别图像数据中的车道目标,根据识别出的车道目标划分出感兴趣区域,并将感兴趣区域作为重点识别目标;数据处理模块控制图像采集模块对感兴趣区域对应的车道作为图像采集目标。数据处理模块用于处理图像采集模块输出的图像数据及速度检测模块的速度数据,并根据所述图像数据及速度数据判断当前车辆与采集目标是否达
当前第1页12345
针对传统驾驶辅助系统评估方法仅单独评估安全性、高效性、舒适性等指标导致结果片面的问题,提出通过多维度参数采集与处理,结合模糊化和归一化技术,综合计算多个指标值生成整体性能评估结果,实现更全面的...
针对驾驶辅助系统在驾驶员偏离规划路线时缺乏实时环境数据的问题,提出在规划路线时同步预载可能偏离路径的起始段环境数据。通过动态划分路线区段并提前加载分支路径数据,确保驾驶员干预后系统仍能获取必要...
1.智能驾驶技术研究 2.智能汽车人机交互研究 3.自动驾驶预期功能安全及可靠性 4.驾驶功能与车辆动力学数据融合 5.驾驶场景大数据分析技术 6.车辆性能研究
1.新能源汽车电驱动技术 2.轮毂电机驱动与控制 3.开关磁阻电机驱动系统控制 4.智能电动汽车
1.内燃机节能及排放控制技术 2.汽车节能与新能源汽车技术 3. 车辆现代设计理论与方法
